|
dlqu22 at m dot fudan dot edu dot cn
I am a fourth-year Ph.D. candidate at the School of Computer Science, Fudan University (FDU) and Shanghai AI Laboratory, Shanghai, China. I'm foutunate to be advised by Prof. Xuelong Li and be part of the EO-Robotics Teamn. My research focuses on Embodied AI and 3D Computer Vision, with a long-term vision of achieving L2-level Physical Intelligence. I'm excited about the prospect of an "GPT moment" in Embodied AI, where AI systems can learn to interact with the physical world in a more human-like way. I was a research intern at Shanghai AI Laboratory with Prof. Xuelong Li. In Dec 2024, I secured the National Natural Science Foundation of China (NSFC) grant to support my research. I will finish my PhD in fall 2027, and I am actively looking for research internship or exciting startup opportunities. |

|
|

|
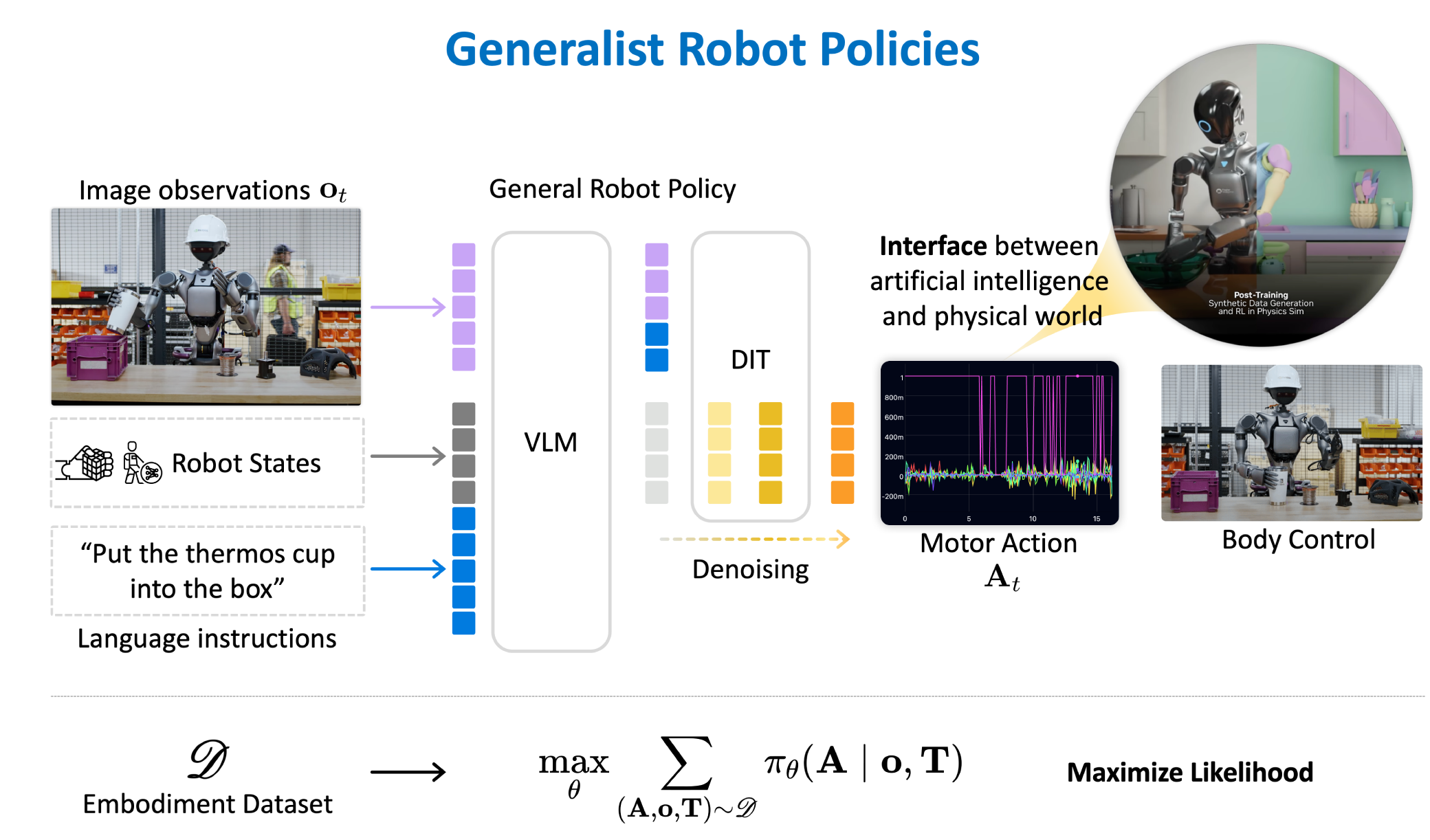
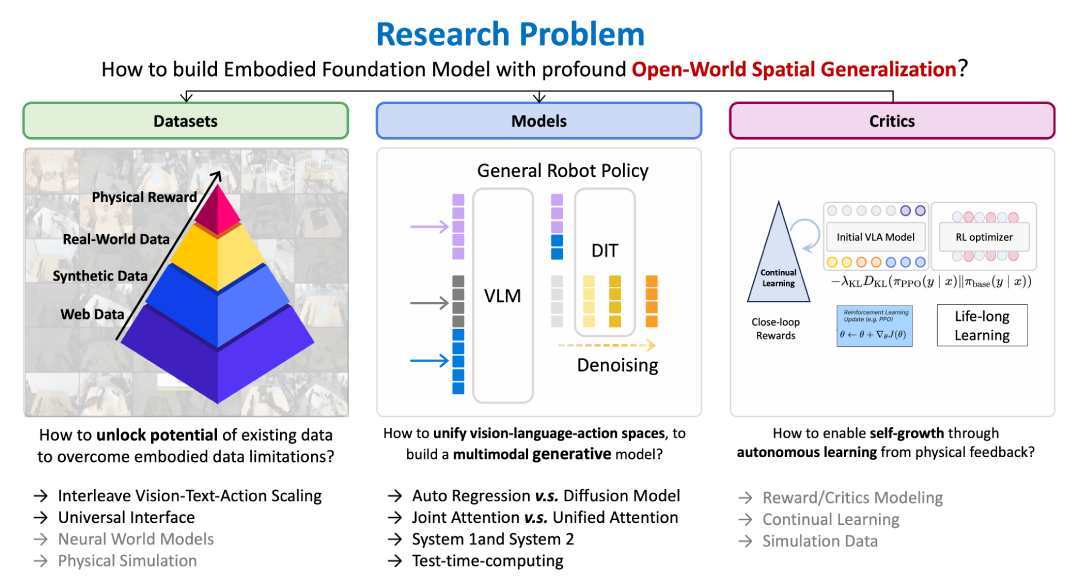
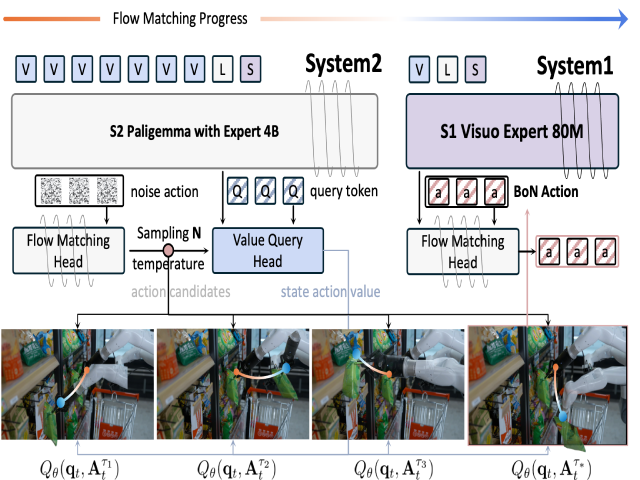
An open-source unified embodied foundation model integrates discrete auto-regressive decoding with continuous flow matching for embodied reasoning and robot control. |
|
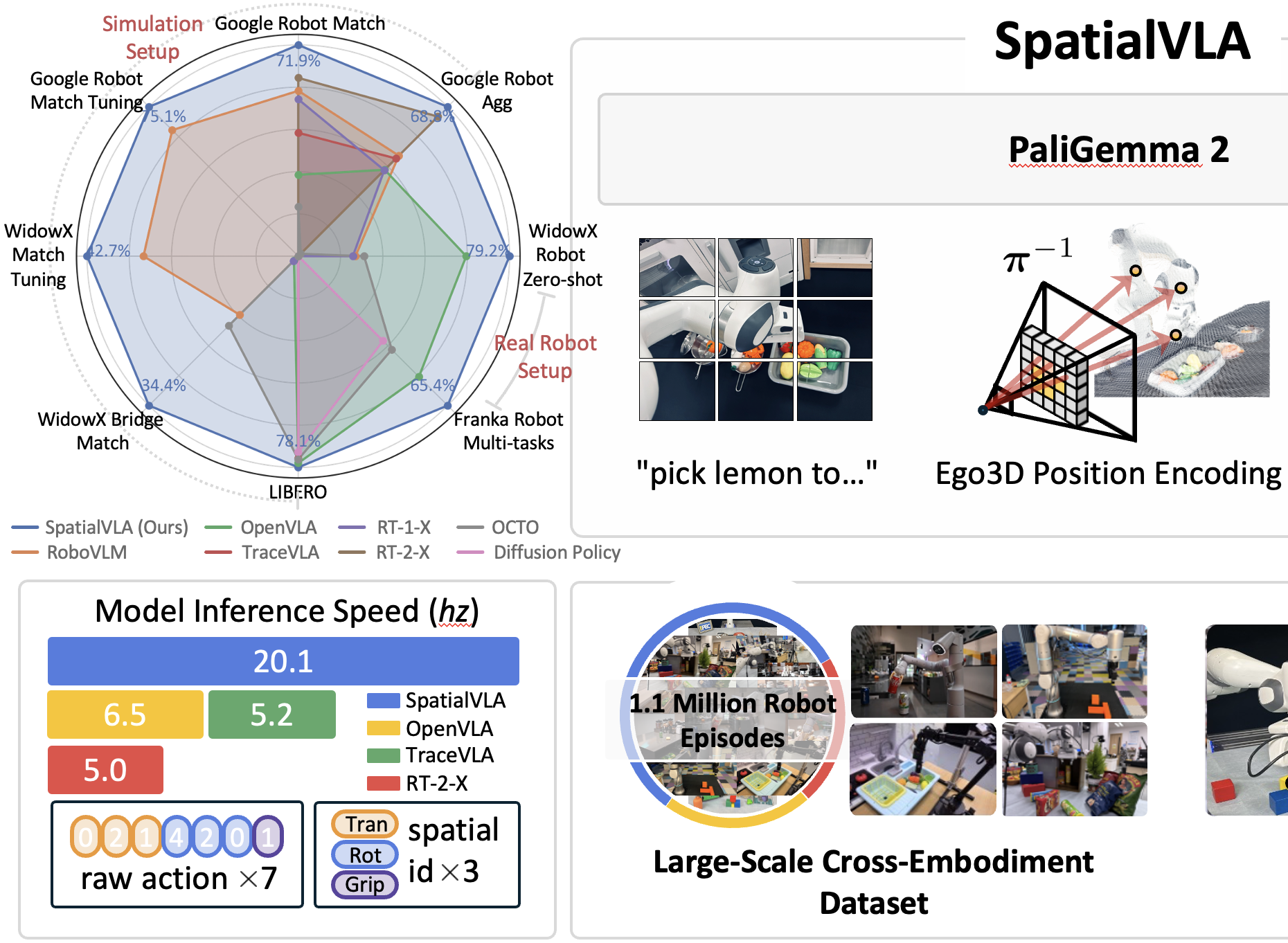
Haoming Song*, Delin Qu*, Yuanqi Yao, Qizhi Chen, Xinyi Ye, Qi Lv, Xianqiang Gao*, Guanghui Ren, Maoqing Yao, Bin Zhao, Dong Wang, Xuelong Li, paper | project page | video | code | model A spatial-enhanced vision-language-action model trained on 1.1 Million real robot episodes, purely huggingFace-based, concise code with efficient performance. |
|
Delin Qu*, Haoming Song*, Qizhi Chen*, Yuanqi Yao, Xinyi Ye, Jiayuan Gu, Bin Zhao, Dong Wang, Xuelong Li, Robotics: Science and Systems (RSS), 2025 (Spotlight) paper | project page | video | code | model A spatial-enhanced vision-language-action model trained on 1.1 Million real robot episodes, purely huggingFace-based, concise code with efficient performance. |
|
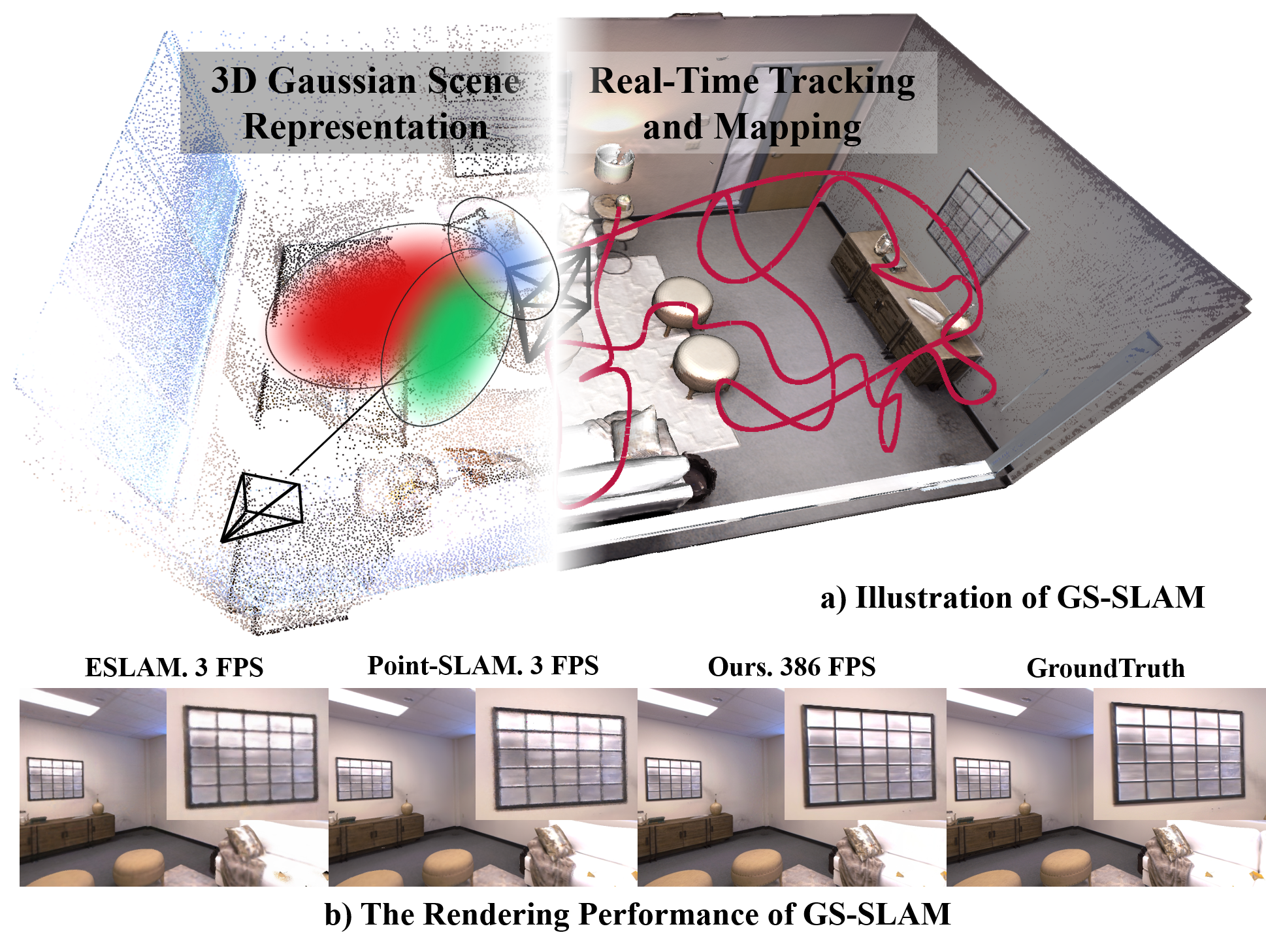
Chi Yan*, Delin Qu*, Dan Xu, Bin Zhao, Dong Wang, Zhigang Wang, Xuelong Li, Conference on Computer Vision and Pattern Recognition (CVPR), 2024, (Spotlight, top 2.6%) paper | project page | video | code The first to utilize 3D Gaussian representation in the Simultaneous Localization and Mapping (SLAM) system. |
|
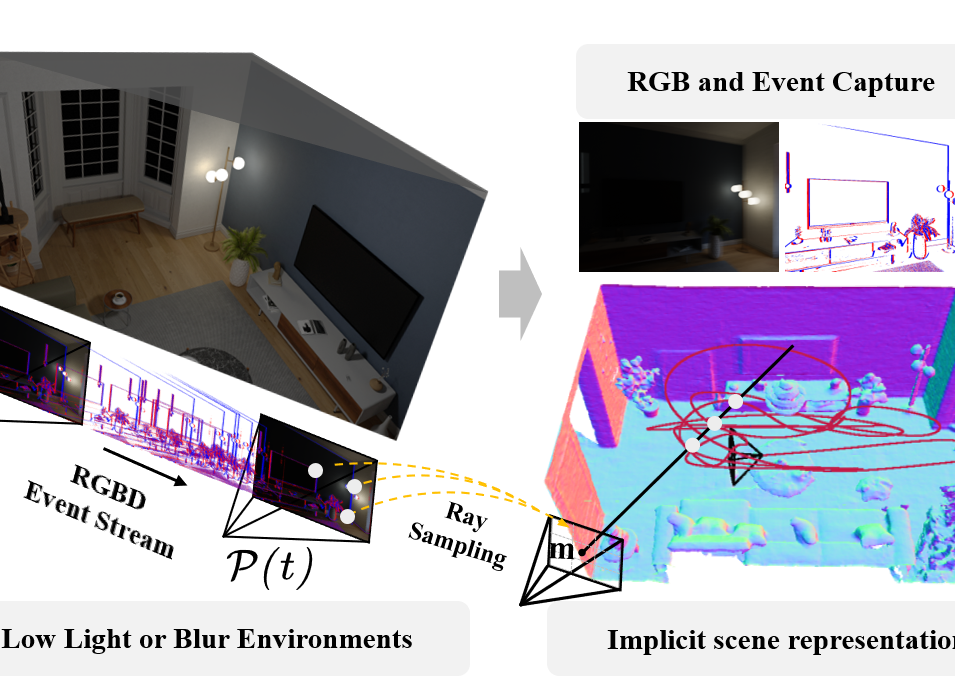
Delin Qu*, Chi Yan*, Yin Jie, Qizhi Chen, Bin Zhao, Dong Wang, Zhigang Wang, Dan Xu, Xuelong Li, Conference on Computer Vision and Pattern Recognition (CVPR), 2024, (Spotlight, top 2.6%) paper | project page | video | code | dataset The first event-RGBD implicit neural SLAM that leverages event stream and RGBD to overcome challenges in motion blur and lighting variation scenes. |
|
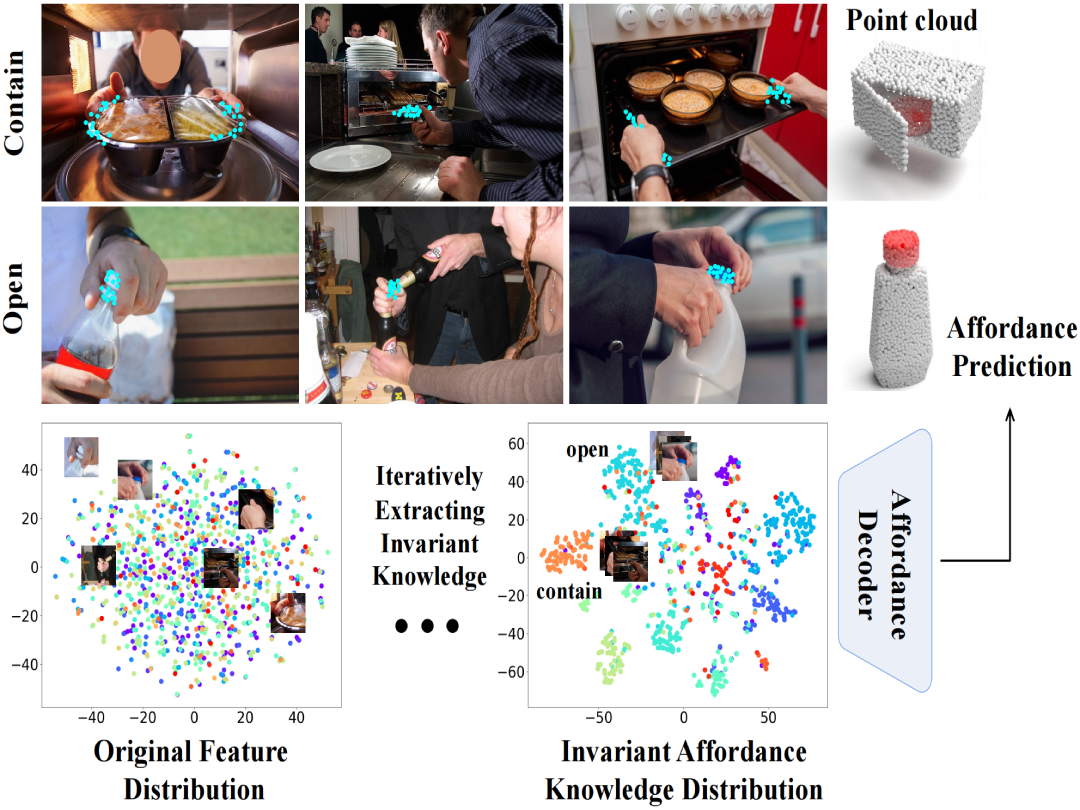
Xianqiang Gao, Pinrui Zhang, Delin Qu*, Zhigang Wang, Yan Ding, Dong Wang, Bin Zhao, Xuelong Li, the Association for the Advancement of Artificial Intelligence ((AAAI Oral, top 4.6%)), 2025, paper | project page | code A Multi-Image Guided Invariant Feature Aware 3D Affordance Grounding (MIFAG) framework. |
|
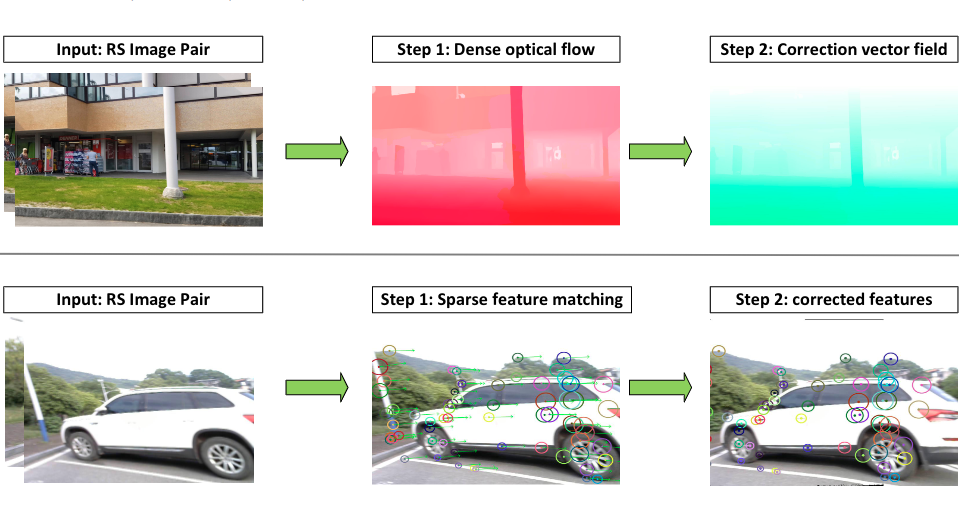
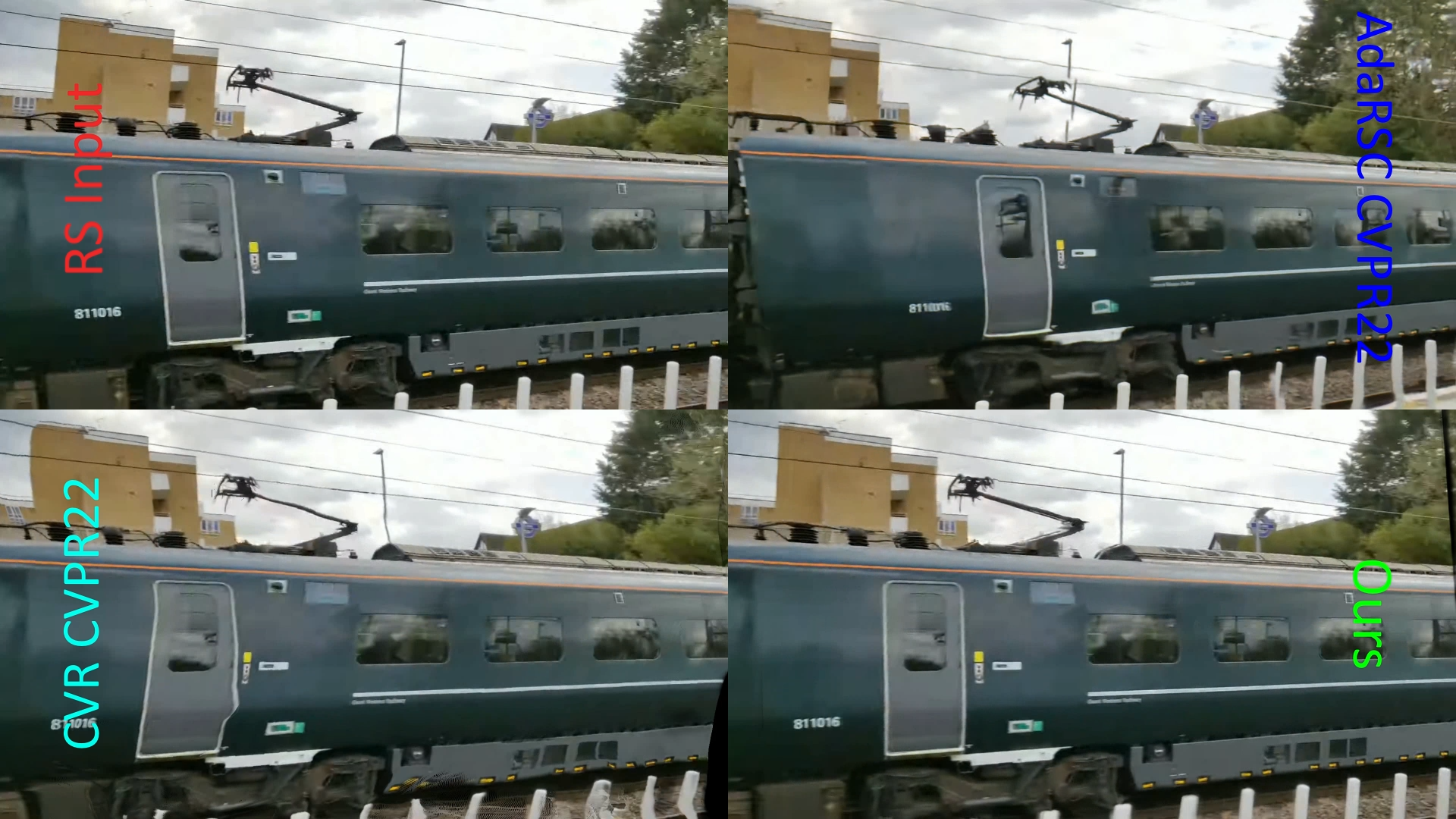
Delin Qu*, Bangyan Liao*, Yifei Xue, Huiqing Zhang, Omar Ait Aider, Yizhen Lao. IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2023 paper | project page | video | code | dataset A pixel-wise varying direct RS correction framework that handles locally varying distortion caused by various sources, such as camera motion, moving objects, and even highly varying depth scenes. |
|
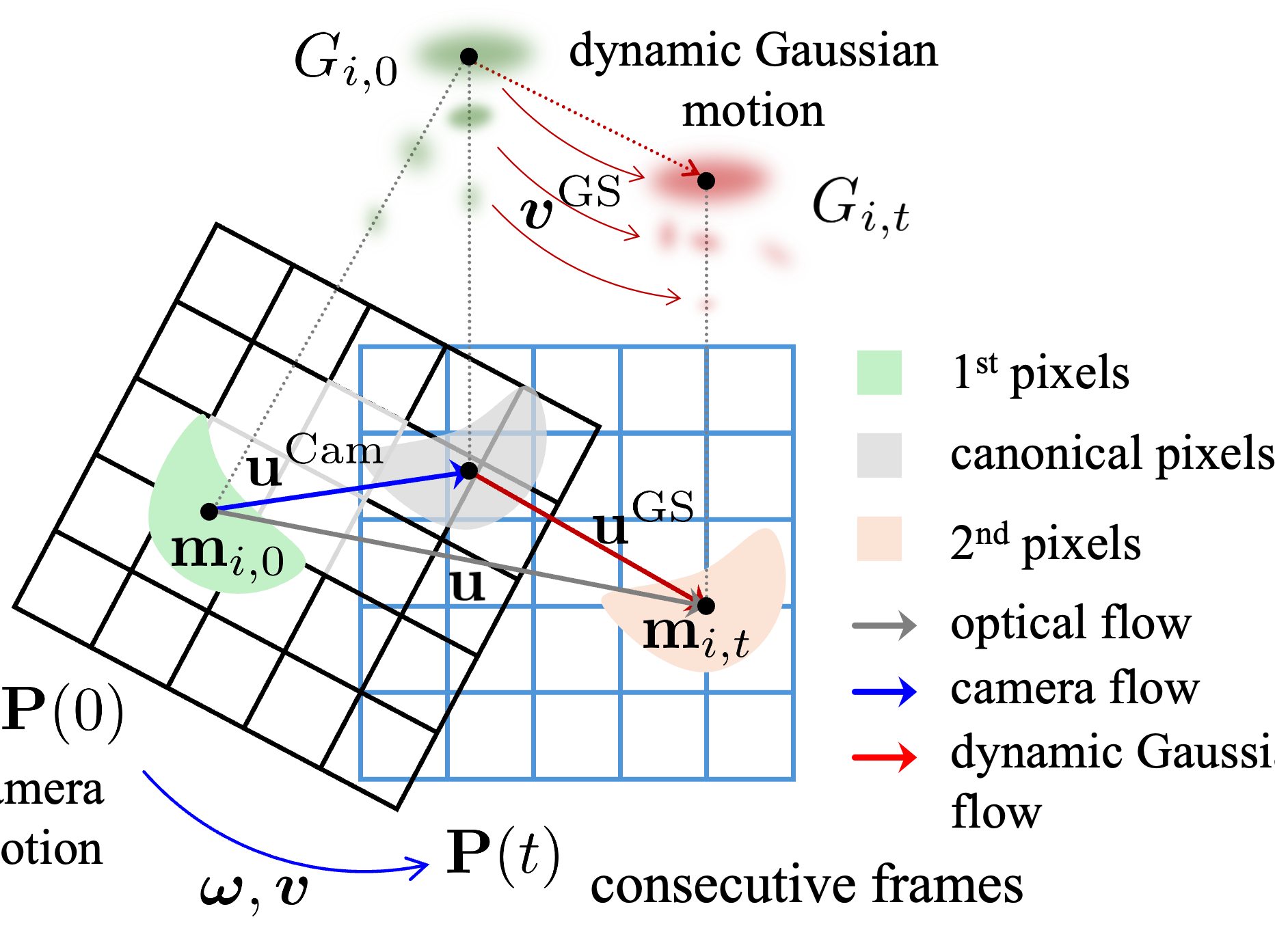
Qizhi Chen*, Delin Qu*, Haoming Song, Yiwen Tang, Dong Wang, Bin Zhao, Xuelong Li, the Association for the Advancement of Artificial Intelligence (AAAI Oral, top 4.6%), 2026, paper | project page | video | code An annotation guidance-free method, dubbed FreeGaussian, that mathematically derives dynamic Gaussian motion from optical flow and camera motion using novel dynamic Gaussian constraints. |
|
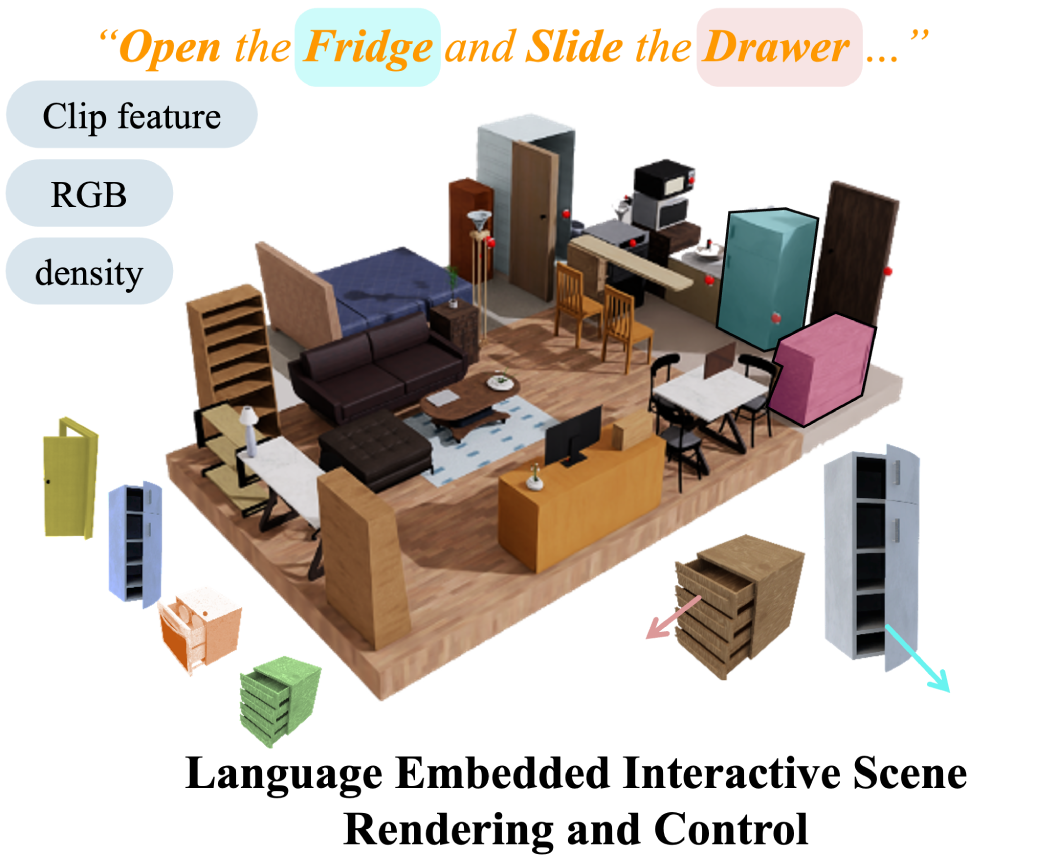
Delin Qu*, Qizhi Chen*, Pingrui Zhang, Xianqiang Gao, Dong Wang, Xuelong Li, Conference on Neural Information Processing Systems (Neurips), 2024 paper | project page | video | code | dataset Embedding language feature to interactive scenes, grounding and manipulating interactable objects with language instructions. |
|
Delin Qu*, Yizhen Lao, Bin Zhao, Zhigang Wang, Dong Wang, Xuelong Li, Proceedings of the IEEE/CVF International Conference on Computer Vision(ICCV), 2023 paper | project page | video | code A geometry-based Quadratic Rolling Shutter (QRS) motion solver, which precisely estimates the high-order correction field of individual pixels. |
|
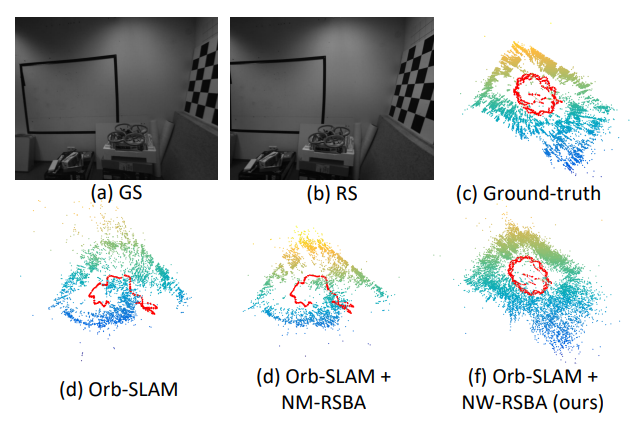
Bangyan Liao*, Delin Qu*, Yifei Xue, Huiqing Zhang, Yizhen Lao. Conference on Computer Vision and Pattern Recognition (CVPR), 2023 paper | project page | video | code An accurate and fast bundle adjustment solution that estimates the 6-DoF pose with an independent RS model of the camera and the geometry of the environment based on measurements from a rolling shutter camera. |
|
Institute of Artificial Intelligence (TeleAI), China Telecom, hosted by Chenjia Bai, Mar 2025 A spatial-enhanced vision-language-action model that is trained on 1.1 Million real robot episodes, toward the More Generalist Agents System. slides |
|
|
Delin Qu*, Qizhi Chen*, Shangkun Sun*, Zhaoshuo Li†, Yu-Wei Chao, Xiaohui Zeng, Xuan Li, Junjie Bai, Tsung-Yi Lin, Ming-Yu Liu†, paper | video | code | 🏆 Award Focus on systematically building our solution by studying the effects of training techniques and data. Show the scaling power in pre-training and post-training phases for competitive performance in Behavior 1K Challenge. |
|
|
Zhaxizhuoma, Kehui Liu, et.al, Delin Qu, Dong Wang, Yan Ding, Bin Zhao, Xuelong Li paper | project page | video | code A substantial redesign of the Universal Manipulation Interface system enabling rapid deployment and delivering robust performance in real-world data acquisition. |
|
|
Xuelong Li, Guan Huang, Zhigang Wang, Delin Qu, Bin Zhao Science China. Information Sciences, 67(2), 124201, 2024 paper | project page | video | code A remote charging technology for drones to enhance their autonomy and intelligence during mission execution |
|
|
Kehui Liu, Zixin Tang, et.al, Delin Qu, Dong Wang, Zhigang Wang, Bin Zhao, Xuelong Li International Conference on Intelligent Robots and Systems (IROS), 2025 paper | project page | video | code A novel LLM-based task planning framework for collaboration of heterogeneous multi-robot systems including quadrotors, robotic dogs, and robotic arms. |
|
paper | project page | video | code A curated collection of utilities for LeRobot Projects, including data conversion scripts, preprocessing tools, training workflow helpers and etc. |
{kind=link}
|
|
|
template adapted from this awesome website |